目标探测
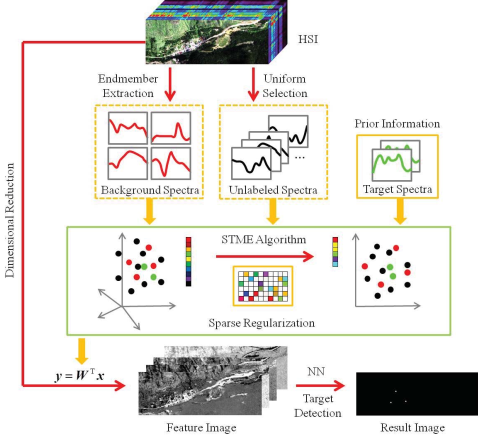
高光谱影像提供了成百甚至上千个波段,承载了丰富的地物光谱信息,在目标探测领域具有独特的优势。目标探测主要利用已知的目标光谱或者异常特性,从各种各样的背景中将感兴趣的目标像素分离出来,本质上是一个二分类问题。日前,目标探测已经在高光谱影像的应用中发挥着越来越重要的作用,例如,对稀有矿物的探测,对石油污染环境的研究,在国防领域对人造物体的侦察和监视等等。
高光谱遥感技术处于当前遥感技术发展的前沿,高光谱图像光谱分辨率高、图谱合一的特点使其在民用和军事领域发挥着越来越大的作用。然而,高光谱图像中混合像元的广泛存在已经成为阻碍高光谱遥感技术向定量化方向发展的主要障碍。通过将混合像元进行分解,能够获取亚像元级别的信息,从而提高高光谱图像分类和地物识别的精度。端元是组成混合像元的基本组成成分,它是可以详尽表示待测地物光谱属性的纯像素,获得的端元向量通常作为高光谱图像处理的先验知识,用来获取各个混合像元的亚像元信息。因此端元光谱的获取是混合像元分解中的一个关键问题。
端元提取
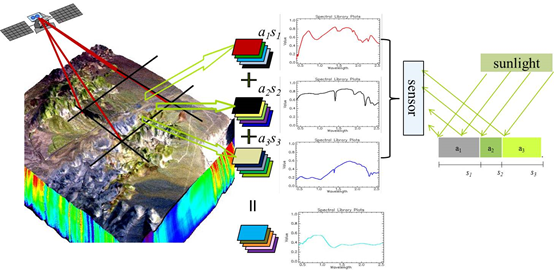
利用高光谱数据进行定量遥感面临的一个突出的问题就是混合像元问题。在用传感器获取地物影像时,由于传感器空间分辨率的限制和地物的复杂性,传感器的瞬时视场内一般包含多种地物。如下图所示,图中的瞬时视场内包含了a_1,a_2,和a_3三种地物,因此对应的像元所记录的是这三种地物光谱信息的混合。下图表示的是线性混合的情况,s_1,s_2和s_3分别表示a_1,a_2,和a_3占像元的面积百分比。从图中可以看出,最后得到的混合像元波谱特性曲线和这三种地物的都不相同,传统的基于像元级光谱统计特性的影像分类方法在这种情况下完全失效,因为无论将这种混合像元归为哪一类都是不正确的,它不完全属于某一类物质。这些不同地物间的光谱混合使得基于光谱特征分析的高光谱遥感应用受到了很大的阻碍。因此,如何有效地解译混合像元成为遥感应用的关键问题之一。混合像元分解是解决混合像元问题最有效的方法。混合像元分解就是将混合像元分解成它的基本组成单元(称为端元),和每一组成单元占像元的面积百分含量(丰度)的过程,即求出下图中的a_1,a_2,a_3和s_1,s_2,s_3。这样,地物识别和分类就能在亚像元的精度上进行。
混合像元分解模型总的来说可以分为线性光谱混合模型和非线性光谱混合模型两类。线性光谱混合模型假定像元光谱是各端元光谱的线性组合,即图1所示的关系;非线性光谱混合模型则认为像元光谱是各端元光谱按照非线性关系综合而成的。由于线性光谱混合模型简单、效率高、物理意义明确等特点,它是目前国内外研究最深入和应用最广泛的混合像元分解模型。线性光谱解混主要包括数据预处理、端元提取、丰度估计等几个环节。其中,端元提取和丰度估计是该流程的两个关键环节,特别是端元提取的结果在一定程度上直接决定了混合像元分解结果的精度。因此,端元提取是混合像元分解过程中至关重要的一步,它是国内外学者研究的热点问题。